You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Start Probleme
- Thread starter Richtel
- Start date
On J5 ,If you unplug it ,you need to have 3.3V on Main PCB (BatterySwitch) side when mower is ON and when you click on power OFF it's 0V after a delay.
Same working for charging (chargeEnable) when you change the setting into battery and start charge at 22V for example.
Same working for charging (chargeEnable) when you change the setting into battery and start charge at 22V for example.
Richtel
Well-known member
Hallo Liebe Gemeinde,
Ich bin sehr Glücklich da mein RoboMäher endlich erste Erfolgreiche Schritte macht mit den 2 Perimeter Empfängern. Einfach herrlich!!!
Aber ein paar Fragen hätte ich noch, ich habe Probleme mit in die Garage Fahren bzw. "Zurück nach Hause".
Er ist ja ich glaube so programmiert, das er dem Draht folgt um wieder nach Hause zu fahren!? Also könnte es sein, das ich vor der Garage den Draht falsch verlegt habe!? denn er findet den Eingang nicht, er steuert auf den Eingang zu, aber stoppt dann und verfolgt den Draht weiter, wieder weg von der Garage!?
Hello dear community,
I am very happy that my RoboMower is finally taking its first successful steps with the 2 perimeter receivers. Just lovely!!!
But I still have a few questions, I have problems with driving to the garage or "back home". I think he is programmed to follow the wire to go home!? So it could be that I routed the wire incorrectly in front of the garage!? because he can't find the entrance, he heads towards the entrance, but then stops and continues following the wire, away from the garage again!?
Ich bin sehr Glücklich da mein RoboMäher endlich erste Erfolgreiche Schritte macht mit den 2 Perimeter Empfängern. Einfach herrlich!!!
Aber ein paar Fragen hätte ich noch, ich habe Probleme mit in die Garage Fahren bzw. "Zurück nach Hause".
Er ist ja ich glaube so programmiert, das er dem Draht folgt um wieder nach Hause zu fahren!? Also könnte es sein, das ich vor der Garage den Draht falsch verlegt habe!? denn er findet den Eingang nicht, er steuert auf den Eingang zu, aber stoppt dann und verfolgt den Draht weiter, wieder weg von der Garage!?
Hello dear community,
I am very happy that my RoboMower is finally taking its first successful steps with the 2 perimeter receivers. Just lovely!!!
But I still have a few questions, I have problems with driving to the garage or "back home". I think he is programmed to follow the wire to go home!? So it could be that I routed the wire incorrectly in front of the garage!? because he can't find the entrance, he heads towards the entrance, but then stops and continues following the wire, away from the garage again!?
If you have activate the 2 Coils management, you need to put the wire under the station, but not in the axes of the station.Hallo Liebe Gemeinde,
Ich bin sehr Glücklich da mein RoboMäher endlich erste Erfolgreiche Schritte macht mit den 2 Perimeter Empfängern. Einfach herrlich!!!
Aber ein paar Fragen hätte ich noch, ich habe Probleme mit in die Garage Fahren bzw. "Zurück nach Hause".
Er ist ja ich glaube so programmiert, das er dem Draht folgt um wieder nach Hause zu fahren!? Also könnte es sein, das ich vor der Garage den Draht falsch verlegt habe!? denn er findet den Eingang nicht, er steuert auf den Eingang zu, aber stoppt dann und verfolgt den Draht weiter, wieder weg von der Garage!?
Hello dear community,
I am very happy that my RoboMower is finally taking its first successful steps with the 2 perimeter receivers. Just lovely!!!
But I still have a few questions, I have problems with driving to the garage or "back home". I think he is programmed to follow the wire to go home!? So it could be that I routed the wire incorrectly in front of the garage!? because he can't find the entrance, he heads towards the entrance, but then stops and continues following the wire, away from the garage again!?
The right coil is used to follow the wire with high precision.
Share a small video to understand ?
Richtel
Well-known member
Ich glaube ich habe das falsch gemacht, grün und rot ist Bestand und blau wäre ein änderungs Vorschlag?
Gäbe es eigentlich einen Lösungsansatz für eine Funk Richtungsortung. evtl. Mit Lorawan!? Sodas der Mäher nicht erst den ganzen Draht abfahren muss, sondern direkt in die Richtung der Ladestation steuert. Natürlich immer noch mit Draht und Hinderniss Erkennung.
I think I did it wrong, green and red are stock and blue would be a suggestion for a change?
Would there actually be a solution for radio directional positioning? maybe with Lorawan!? So that the mower doesn't have to drive down the entire wire first, but instead steers directly in the direction of the charging station. Of course still with wire and obstacle detection.
Gäbe es eigentlich einen Lösungsansatz für eine Funk Richtungsortung. evtl. Mit Lorawan!? Sodas der Mäher nicht erst den ganzen Draht abfahren muss, sondern direkt in die Richtung der Ladestation steuert. Natürlich immer noch mit Draht und Hinderniss Erkennung.
I think I did it wrong, green and red are stock and blue would be a suggestion for a change?
Would there actually be a solution for radio directional positioning? maybe with Lorawan!? So that the mower doesn't have to drive down the entire wire first, but instead steers directly in the direction of the charging station. Of course still with wire and obstacle detection.
Attachments
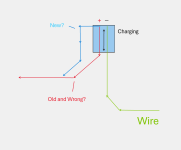
If you use the 2 coils option:
Mower track the wire using right one ,perfectly upper the wire.If the left one detect the wire and see outside detection (red drawing) then it assume it's a 90 deg angle and start to roll,so never reach the station.
Blue drawing is OK.
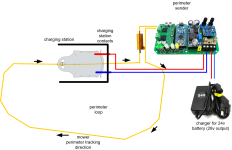
To avoid tracking the full wire you need to add the RFID option.
 wiki.ardumower.de
Reader is connected directly to MainPCB
wiki.ardumower.de
Reader is connected directly to MainPCB
BUT you need to have space in the chassis at less than 10 cm of the ground.
Mower track the wire using right one ,perfectly upper the wire.If the left one detect the wire and see outside detection (red drawing) then it assume it's a 90 deg angle and start to roll,so never reach the station.
Blue drawing is OK.
To avoid tracking the full wire you need to add the RFID option.
AzuritBer RFID option (English) – www.wiki.ardumower.de
BUT you need to have space in the chassis at less than 10 cm of the ground.

 !!!
!!! Richtel
Well-known member
Danke dir.....Rot und grün müssen schön weit (10cm ist absolutes Minimum) auseinander liegen! Die blaue Lösung ist besser!
Red and green have to be a good distance apart (10cm is an absolute minimum)! The blue solution is the better one!


On DENNA it was under the mower inside a 3D printed case.I think your reader it is mounted in a case under the mower.
The cards are working, but the keyrings are not working? Right?
Are the cards under the lawn?
On Robomow it is inside the chassis under the battery pack.
On MI632 it is under the chassis.
Only card work, but i have more than 20 cards inside my garden and all of them are not visible (grass and ground cover them after 2 month)
After 2 or 3 years all are working well, but only the mower in tracking mode can tell me were they are
 (cards are under the lawn)
(cards are under the lawn)RFID is very useful to change the tracking speed (increase to 255 in straight line) and to reduce the docking speed .
Richtel
Well-known member
Then I have another question,
Has anyone installed these waterproof ultrasonic sensors (JSN-SR04T)?
You would definitely have to rewrite the code to make it work, right?!
Dann hätte ich noch eine Frage,
hatt denn jemand evtl. diese Wasserdichten Ultraschallsensoren ( JSN-SR04T ) verbaut!? Da müsste mamn bestimmt den Code Umschreiben damit sie funktionieren oder?!
Has anyone installed these waterproof ultrasonic sensors (JSN-SR04T)?
You would definitely have to rewrite the code to make it work, right?!
Dann hätte ich noch eine Frage,
hatt denn jemand evtl. diese Wasserdichten Ultraschallsensoren ( JSN-SR04T ) verbaut!? Da müsste mamn bestimmt den Code Umschreiben damit sie funktionieren oder?!
Attachments

Richtel
Well-known member
Ok ich habe sie mal angesteckt aber da habe ich keine Rückmeldung bekommen vom Board. Deswegen dachte ich da muss evtl. eine Bibliothek geändert bzw. Hinzu gefügt werden!?Habe ich zu Hause liegen, aber nicht getestet. Code muss nicht geändert werden, müssen nur aktiviert werden, die Anschlüsse sind die selben wie bei den normalen
Into setting / sonar set Use to YES and activate the Left or right or center according your platform.Ok ich habe sie mal angesteckt aber da habe ich keine Rückmeldung bekommen vom Board. Deswegen dachte ich da muss evtl. eine Bibliothek geändert bzw. Hinzu gefügt werden!?
SAVE SETTING and reboot.
Now into setting/sonar you need to see the distance value change according something in front of mower.
You can also adjust into the setting / station the docking speed if sonar detect the station.