Hallo,
ich habe von Sascha das aktuelle Board Set. Ach habe alles fertig zusammen gelötet und geflasht mit Teensy (Azurit) und esp32 (Parselle).
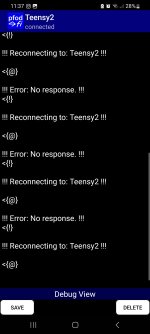
Leider bekomme ich keine Verbindung über die pfod app oder Arduremote. Sie verbindet sich über Bluetooth mit dem esp32 aber nicht mit der Pfod app.
Konsole für esp32 meldet Server gestartet.
Konsole von Teensy meldet auch sehr viele Fehler das einzigste was wohl funktioniert ist, der Gyro Sensor.
Motortreiber installiert und funktionieren auch über den Poti der auf dem Treiber ist
ich habe von Sascha das aktuelle Board Set. Ach habe alles fertig zusammen gelötet und geflasht mit Teensy (Azurit) und esp32 (Parselle).
Leider bekomme ich keine Verbindung über die pfod app oder Arduremote. Sie verbindet sich über Bluetooth mit dem esp32 aber nicht mit der Pfod app.
Konsole für esp32 meldet Server gestartet.
Konsole von Teensy meldet auch sehr viele Fehler das einzigste was wohl funktioniert ist, der Gyro Sensor.
Motortreiber installiert und funktionieren auch über den Poti der auf dem Treiber ist