ullisun58
Well-known member
Hallo,
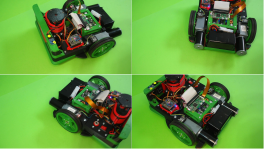
heute habe ich auf github den bisherigen Code für den MINI-roπLawnMow hochgeladen. Da der große noch im Gartenhaus steht, entwickle ich den Code und den Ablauf der Steuerung derzeit auf dem kleinen Modell. Nachdem ich die Gyro Daten des MPUs erfolgreich auslesen kann und auch die Tracks sehr gut reproduzierbar sind, habe ich in den letzten Tagen damit begonnen die ToF Sensoren in die Steuerung mit einzueziehen.
Heute habe ich dieses Video aufgenommen. Es zeigt eine autonome Fahrt, bei der er nur die ToF Entfernungen ausließt (Threshhold 20cm) und entsprechend reagiert.
View attachment MINIAutoMow.mp4
Läuft er im Winkel auf ein Hindernis zu, so biegt er ab, steurt er direlkt auf das Hindernis zu, dann vollzieht er eine Wendung. Bei den Fahrten wird die Richtungskorrektur nur zum aktuellen Richtung durchgeführt, mit der er nach einer Drehung/ Wendung gestartet ist.
Als nächstes werde ich daran arbeiten andere Fahrmuster zu hinterlegen und konfiguriernar zu machen, danach die Kamera als Sensor mit einbeziehen. Dann wird es sicher auch schon bald wieder wärmer und ich kan den roπLawnMow wieder hervorholen und die SW darauf portieren und testen.
Viel Spaß beim Video Schauen
heute habe ich auf github den bisherigen Code für den MINI-roπLawnMow hochgeladen. Da der große noch im Gartenhaus steht, entwickle ich den Code und den Ablauf der Steuerung derzeit auf dem kleinen Modell. Nachdem ich die Gyro Daten des MPUs erfolgreich auslesen kann und auch die Tracks sehr gut reproduzierbar sind, habe ich in den letzten Tagen damit begonnen die ToF Sensoren in die Steuerung mit einzueziehen.
Heute habe ich dieses Video aufgenommen. Es zeigt eine autonome Fahrt, bei der er nur die ToF Entfernungen ausließt (Threshhold 20cm) und entsprechend reagiert.
View attachment MINIAutoMow.mp4
Läuft er im Winkel auf ein Hindernis zu, so biegt er ab, steurt er direlkt auf das Hindernis zu, dann vollzieht er eine Wendung. Bei den Fahrten wird die Richtungskorrektur nur zum aktuellen Richtung durchgeführt, mit der er nach einer Drehung/ Wendung gestartet ist.
Als nächstes werde ich daran arbeiten andere Fahrmuster zu hinterlegen und konfiguriernar zu machen, danach die Kamera als Sensor mit einbeziehen. Dann wird es sicher auch schon bald wieder wärmer und ich kan den roπLawnMow wieder hervorholen und die SW darauf portieren und testen.
Viel Spaß beim Video Schauen



")