You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Anschließen von Power PCB 1.06, Main PCB 1.03 und ZS-X11H Motortreiber
- Thread starter SefanH
- Start date
SefanH
Well-known member
Wir reden aneinander vorbei:
Wenn der Teensy startet, behauptet der in der Konsole das der Button gedrückt wird. Wenn ich da einen Jumper raufstecke ist alles in Ordnung. Wenn ich den Jumper wieder ziehe, dann zählt er wieder hoch (bis 3). Da muss also ein Taster NC (Normaly close/öffner) verwendet werden?!? Oder habe ich irgendwo einen Fehler?!?
Wenn der Teensy startet, behauptet der in der Konsole das der Button gedrückt wird. Wenn ich da einen Jumper raufstecke ist alles in Ordnung. Wenn ich den Jumper wieder ziehe, dann zählt er wieder hoch (bis 3). Da muss also ein Taster NC (Normaly close/öffner) verwendet werden?!? Oder habe ich irgendwo einen Fehler?!?
You need to test the start button of the MOW800 ,if it is close when you don't push it : you need to set this value to true.Ah ok das kannst du in der mower.h ändern:
Code:#define START_BUTTON_IS_NC false //if button is normaly closed
Die und die mower.cpp musst du mal durchgehen.
But if like the yardforce chassis it's a cover using a NO contact you need to add a push button.
SefanH
Well-known member
Ich habe jetzt beide Platinen miteinander verbunden und zum testen am Akku angeschlossen.
Teensy und ESP arbeiten. Der IMU scheint nicht zu laufen und die I2C Verbindung zum Power PCB funktioniert nicht. Was nützt Ihr für Kabel für die Verbindung? ISTY 4x2x0,6? Ich nutze zur Zeit Regenbogenkabel in ca. 30cm Länge. Vielleicht doch zu lang?
Teensy und ESP arbeiten. Der IMU scheint nicht zu laufen und die I2C Verbindung zum Power PCB funktioniert nicht. Was nützt Ihr für Kabel für die Verbindung? ISTY 4x2x0,6? Ich nutze zur Zeit Regenbogenkabel in ca. 30cm Länge. Vielleicht doch zu lang?
Are you sure that the SDA and SCL are not inverted on the INA226 PCB (China product)
If it's the case simply invert SDA and SCL in the connector between the 2 PCB .
Check also the shunt at back of ina226
If it's the case simply invert SDA and SCL in the connector between the 2 PCB .
Check also the shunt at back of ina226
TEENSY PCB WIRING
Some picture of the wiring. Main PCB and Power PCB Here the shunt on the 6 INA226 USE R010 instead R100 on the INA226
www.diy-robot-lawn-mower.com
Please post a photo of the charge PCB including INA226I've seen that the charge current ist about 8v with open contacts?!? Eventually a broken diode?


It's only OK if the mainPCB is not connected (No 3.3V on PinBatterySwitch).If J8 ist bridged, the power is on. If i leave it open, the power switches off... Is it ok?
But if you connect the 2 PCB , power need to stay ON when you remove bridge on J8
Teensy send 3.3V on PinBatterySwitch
So check that you have 3.3V on J1 PinBatterySwitch and not on J1 PinchargeEnable (wire inverted ??)
SefanH
Well-known member
Ich habe mal gemessen:
Irgendwo ist was faul!
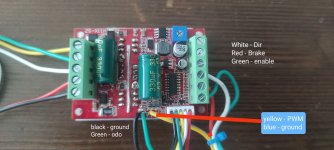
- PWM - Signal ist zu sehen und regelt auch hoch.
- DIR - Je nach Fahrtrichtung 0 oder 3,3V
- EN - immer 0
- BREAK - immer 0
Irgendwo ist was faul!
Blue poti on driver is not set to 0 ?Der Motor dreht ohne PWM-Signal.
Show me a picture of the wiring .