You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
ZS-X11H Brushless Motor Driver
- Thread starter Sascha
- Start date

Hallo,
ich bräuchte nochmal hilfe bei der Verkabelung des ZS-x11h Treibers für den Mähmotor.
Es gibt wohl verschiedene Versionen und scheinbar auch verschiedene anschluss pläne!? Also die brücke für externen potentiometer ist gebrückt sodas der aufgesetzte podi nicht mehr funktioniert.
Vielen Dank
Hello,
I need help again with the wiring of the ZS-x11h driver for the Mower Motor.
There are probably different versions and apparently different connection plans!?
So the bridge for the external potentiometer is bridged so that the attached podi no longer works.
Many Thanks
ich bräuchte nochmal hilfe bei der Verkabelung des ZS-x11h Treibers für den Mähmotor.
Es gibt wohl verschiedene Versionen und scheinbar auch verschiedene anschluss pläne!? Also die brücke für externen potentiometer ist gebrückt sodas der aufgesetzte podi nicht mehr funktioniert.
Vielen Dank
Hello,
I need help again with the wiring of the ZS-x11h driver for the Mower Motor.
There are probably different versions and apparently different connection plans!?
So the bridge for the external potentiometer is bridged so that the attached podi no longer works.
Many Thanks
Attachments



Hallo
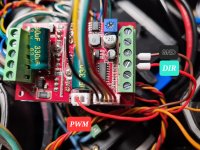
ich habe das Mysterium lösen können mit dem Treiberanschluss. Also es wird nur GND, DIR und PWM angeschlossen. Brake wird nicht gebraucht scheinbar.
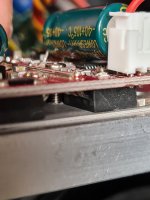
Aber ich habe ein hohen Preis für diese erkenntniss gezahlt gebt bitte acht bei diesen X11h Treibern. Ich habe mir heut mein teensy zerschossen, weil bei meinem Treiber mal volle 25v auf dem großem Kühlkörper anlagen und ein loses kabel dieses berührte, war es das für den teensy. Ich hab mich riesig gefreut darüber wie ihr euch denken könnt. Es wurde wahrscheinlich von den beiden Befestigungsschrauben ausgelöst, die den Kühlkörper halten. habe diese Isoliert mit einer kleinen plastik Unterlagscheibe jetzt geht es. Was für ein Abend....
gebt bitte acht bei diesen X11h Treibern. Ich habe mir heut mein teensy zerschossen, weil bei meinem Treiber mal volle 25v auf dem großem Kühlkörper anlagen und ein loses kabel dieses berührte, war es das für den teensy. Ich hab mich riesig gefreut darüber wie ihr euch denken könnt. Es wurde wahrscheinlich von den beiden Befestigungsschrauben ausgelöst, die den Kühlkörper halten. habe diese Isoliert mit einer kleinen plastik Unterlagscheibe jetzt geht es. Was für ein Abend....
Viele Grüße
Hello I was able to solve the mystery with the driver connection.
So only GND, DIR and PWM are connected. Brake is not needed apparently.
But I paid a high price for this knowledge please be careful with these X11h drivers. I shot my Teensy today, because my driver had a full 25v on the large heat sink and a loose cable touched it, that was it for the teensy.
I was really happy about so you can think of.
It was likely triggered by the two mounting screws holding the heatsink. I have this isolated with a small plastic washer now it works. What an evening....
Best regards
ich habe das Mysterium lösen können mit dem Treiberanschluss. Also es wird nur GND, DIR und PWM angeschlossen. Brake wird nicht gebraucht scheinbar.
Aber ich habe ein hohen Preis für diese erkenntniss gezahlt
gebt bitte acht bei diesen X11h Treibern. Ich habe mir heut mein teensy zerschossen, weil bei meinem Treiber mal volle 25v auf dem großem Kühlkörper anlagen und ein loses kabel dieses berührte, war es das für den teensy. Ich hab mich riesig gefreut darüber wie ihr euch denken könnt. Es wurde wahrscheinlich von den beiden Befestigungsschrauben ausgelöst, die den Kühlkörper halten. habe diese Isoliert mit einer kleinen plastik Unterlagscheibe jetzt geht es. Was für ein Abend....Viele Grüße
Hello I was able to solve the mystery with the driver connection.
So only GND, DIR and PWM are connected. Brake is not needed apparently.
But I paid a high price for this knowledge
please be careful with these X11h drivers. I shot my Teensy today, because my driver had a full 25v on the large heat sink and a loose cable touched it, that was it for the teensy. I was really happy about so you can think of.
It was likely triggered by the two mounting screws holding the heatsink. I have this isolated with a small plastic washer now it works. What an evening....
Best regards
Attachments


Last edited:
ullisun58
Well-known member
Hallo, guten Abend.
Ich bin seit heute neu in diesem Forum. Seit fast genau 2 Jahren baue ich Mal mehr, Mal weniger an verschiedenen Antriebskonzepten. Einige Videos dazu könnt ihr auf YouTube sehen.
Ich preferiere brushless Motore, die gibt es gebraucht schon sehr günstig oder kpl. mit ausgedienten Mowern. Jedoch habe ich noch das Problem, dass ich sie nicht richtig antreiben kann. Egal ob per Poti oder mit pwm Impuls betrieben wird, haben die Motoren eine Anfahrrampe, auch ohne Last. Soll heißen sie kommen erst nach 2 bis 3 Sekunden auf Touren.
In dem Video von Sascha mit dem Treiber Zs x11a scheint das aber gut zu gehen. Habt ihr Erfahrungen damit?
Ich bin seit heute neu in diesem Forum. Seit fast genau 2 Jahren baue ich Mal mehr, Mal weniger an verschiedenen Antriebskonzepten. Einige Videos dazu könnt ihr auf YouTube sehen.
Ich preferiere brushless Motore, die gibt es gebraucht schon sehr günstig oder kpl. mit ausgedienten Mowern. Jedoch habe ich noch das Problem, dass ich sie nicht richtig antreiben kann. Egal ob per Poti oder mit pwm Impuls betrieben wird, haben die Motoren eine Anfahrrampe, auch ohne Last. Soll heißen sie kommen erst nach 2 bis 3 Sekunden auf Touren.
In dem Video von Sascha mit dem Treiber Zs x11a scheint das aber gut zu gehen. Habt ihr Erfahrungen damit?
ZSX11 response time on poti or PWM input is less than 0.5s .Hallo, guten Abend.
Ich bin seit heute neu in diesem Forum. Seit fast genau 2 Jahren baue ich Mal mehr, Mal weniger an verschiedenen Antriebskonzepten. Einige Videos dazu könnt ihr auf YouTube sehen.
Ich preferiere brushless Motore, die gibt es gebraucht schon sehr günstig oder kpl. mit ausgedienten Mowern. Jedoch habe ich noch das Problem, dass ich sie nicht richtig antreiben kann. Egal ob per Poti oder mit pwm Impuls betrieben wird, haben die Motoren eine Anfahrrampe, auch ohne Last. Soll heißen sie kommen erst nach 2 bis 3 Sekunden auf Touren.
In dem Video von Sascha mit dem Treiber Zs x11a scheint das aber gut zu gehen. Habt ihr Erfahrungen damit?
With 2 or 3 secondes it can't work on a mower : A pid is used at fast frequency to manage the 2 wheel speed and drive on perfect straight line.
ullisun58
Well-known member
Hi Bernhard thx a lot for your fast responce. I ordered via Ebay the ZS-X11 H and will try this controller. Durinng the past I used these Cotroller, Left side is a ZSX11B and on the right side is a XY-BLDC. Hope the ZSX11H is the best choice
You published in Nov last year this short Video. Is it possible that you can share the Code for the Arduino?
May be that I doing something wrong in My Raspberry Pi Code. I also saw a post about Positioning without GPS. I published on last monday this short Video on twitter from a test drive last Weekend.
I am Member of the PiMowBot Community https://forum-raspberrypi.de/forum/...in-autonomer-rasenmaeher-roboter-in-3d-druck/ but i a not printing a mower in 3d I use existing chassis.
Thx for your support Bernhard.
Best Regards Ulli
You published in Nov last year this short Video. Is it possible that you can share the Code for the Arduino?
May be that I doing something wrong in My Raspberry Pi Code. I also saw a post about Positioning without GPS. I published on last monday this short Video on twitter from a test drive last Weekend.
I am Member of the PiMowBot Community https://forum-raspberrypi.de/forum/...in-autonomer-rasenmaeher-roboter-in-3d-druck/ but i a not printing a mower in 3d I use existing chassis.
Thx for your support Bernhard.
Best Regards Ulli
Attachments


Video was for ZSX12H and finally i don't recommend this driver for mower , on high load the 2 or 3 second delay appear, certainly a sense safety on the speed management.
ZSX11H (red one with 2 capicitors) work perfectly up to 2A i think.
It's a 3.3V module , but you need 2 resistor to level down the odometry signal from 5V to 3.3V and directly connect the 3.3V module to PWM and brake (take a look at teensy pcb schematics)
I don't understand your video, All my test on PI3 or 4 show a very slow frame rate result when detection is activate .
I use Tensorflow and it's 2 Frames/sec on pi4 and only 1 frame/sec on Pi3
Can you explain a little more your concept ?
Here the code :
ZSX11H (red one with 2 capicitors) work perfectly up to 2A i think.
It's a 3.3V module , but you need 2 resistor to level down the odometry signal from 5V to 3.3V and directly connect the 3.3V module to PWM and brake (take a look at teensy pcb schematics)
I don't understand your video, All my test on PI3 or 4 show a very slow frame rate result when detection is activate .
I use Tensorflow and it's 2 Frames/sec on pi4 and only 1 frame/sec on Pi3
Can you explain a little more your concept ?
Here the code :
Attachments
@ullisun58
1 or 2 years ago, I have also tested the XY-BLDC and old version of ZSX11 and i see the result you describe.
I have also destroy many of them when i test with overboard wheel .
.
Overboard PCB with overboard wheel (old version) is OK after changing the firmware, but speed is too high and no correct feedback of motor. sense.
If you want something simple with a very fast PWM response : DC motor with BTS7960 or MC33926 is the best choice, but it's not brushless.
1 or 2 years ago, I have also tested the XY-BLDC and old version of ZSX11 and i see the result you describe.
I have also destroy many of them when i test with overboard wheel
.Overboard PCB with overboard wheel (old version) is OK after changing the firmware, but speed is too high and no correct feedback of motor. sense.
If you want something simple with a very fast PWM response : DC motor with BTS7960 or MC33926 is the best choice, but it's not brushless.
ullisun58
Well-known member
Good morning Bernhard,@ullisun58
1 or 2 years ago, I have also tested the XY-BLDC and old version of ZSX11 and i see the result you describe.
I have also destroy many of them when i test with overboard wheel
Overboard PCB with overboard wheel (old version) is OK after changing the firmware, but speed is too high and no correct feedback of motor. sense.
If you want something simple with a very fast PWM response : DC motor with BTS7960 or MC33926 is the best choice, but it's not brushless.
thats give me a hope, that I will keep the brushless Motors up an running in my mower. I looked into the arduino code and it seems it is not so ifficult to understand. My Mower I will introduce him in an seperate thread soon. Shortly it is a Raspberry Pi with Camera, The Camera look on the lawn and if there are to less green pixels in the captured Picture (every 400ms) then the software behind react. There a 7 frames in the picture, so it gives a lot of possibilites. On the website there is an mpeg stream. The green detection is written in Rebol, of the " Father " of the PiMowBot. There are also a lot other Moduls written in Rebol, but the interfaces to the e.g. MPU, the Motors, Camera, ToF Sensors are written in Python and the Communication between the Python Moduls and Rebol is the filesystem. In my Mower, I call him "Hybrid" because there is an additional Ardunino Nano inside. Interface between Pi and Bruschless controller. With Pi I was not able to controll the Mower in driving.
So far a short overview. An Explanation of the Video I will do it seperat
You mentioned the the ZSX12 is not the best choice. My Idea was to build a little Mower with 4WD and on top a bobycar case. This will look funny in the garde. But first i will finish this projekt.
Best regards Ulli
ullisun58
Well-known member
Hello all,
I saw today an interesting Link on twitter. Maybe there is additional information about the ZS-X11H Controller. The link is mainly for Hoverboards, but in my opinion comparable. I only would share the link. Hope my controller comes soon. I check every day my parclebox.
I saw today an interesting Link on twitter. Maybe there is additional information about the ZS-X11H Controller. The link is mainly for Hoverboards, but in my opinion comparable. I only would share the link. Hope my controller comes soon. I check every day my parclebox.
ullisun58
Well-known member
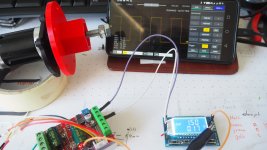
Hallo zusammen,
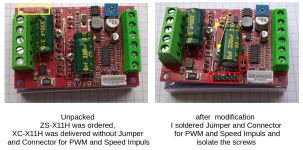
heute sind mein BLDC COntroller gekommen. ich habe sie natürlich sofort ausgepackt. Dank der umfangreichen Erfahrungen hier im Forum habe ich noch die Modifikationen vorgenommen und erst einmal an einem PWM Generator angeschlossen. Das Ergebnis ist schon beeindrucken und überhaupt nicht vergleichbar mit dem Einsatz eines ZS-X11B Controllers. Das ist echt super. Danke an Bernard der mir reichlich Tipps gegeben hat und auch der Beitrag von Richtel aus Mai diesen Jahres hat mir geholfen. Dann werde ich nun mal das Motor-Python Interface meines PiMowBot Mähers in den nächsten Tagen anpassen und mich über die direkte Steuerung freuen.
Sicher werde ich von den Ergebnissen berichten wenn gewünscht.
Gruß
Ulli
heute sind mein BLDC COntroller gekommen. ich habe sie natürlich sofort ausgepackt. Dank der umfangreichen Erfahrungen hier im Forum habe ich noch die Modifikationen vorgenommen und erst einmal an einem PWM Generator angeschlossen. Das Ergebnis ist schon beeindrucken und überhaupt nicht vergleichbar mit dem Einsatz eines ZS-X11B Controllers. Das ist echt super. Danke an Bernard der mir reichlich Tipps gegeben hat und auch der Beitrag von Richtel aus Mai diesen Jahres hat mir geholfen. Dann werde ich nun mal das Motor-Python Interface meines PiMowBot Mähers in den nächsten Tagen anpassen und mich über die direkte Steuerung freuen.
Sicher werde ich von den Ergebnissen berichten wenn gewünscht.
Gruß
Ulli
Attachments
ullisun58
Well-known member
Ja da habe ich gerade ein Video nach Youtube hochgeladen.
es zeigt wie direkt die steuerung jetzt im Vergleich zu den vorigen Videos ist. Die Aufnahme Links ist hat meine Tochter aufgenommen, das andere ist de zeitgleiche Bildschirm Mitschnitt. Als nächstes muss ich noch die optimale Geschwindigkeit für die Treiber in der SW anpassen
Hier der Link
es zeigt wie direkt die steuerung jetzt im Vergleich zu den vorigen Videos ist. Die Aufnahme Links ist hat meine Tochter aufgenommen, das andere ist de zeitgleiche Bildschirm Mitschnitt. Als nächstes muss ich noch die optimale Geschwindigkeit für die Treiber in der SW anpassen
Hier der Link
ullisun58
Well-known member
Hello,
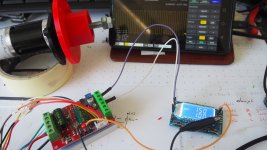
Yesterday I received more brushless Motor Controllers. We know that the one on the left works well, I would connect him directly on a Raspberry Pi and test whether the Pi can process the HALL information properly. The difference of the pi to the ESP/ Arduino is, that there is a python interpreter and a lot of other process are running at the same time on the Pi. Has anybody experience with the processing of the Hall Impulses with the Pi. I know that I have to reduce the 5V Output Signal of the Controller to 3.3V level that the Pi needs. But I think about the interrupt calculation and processing.
Any advice is welcome.

Yesterday I received more brushless Motor Controllers. We know that the one on the left works well, I would connect him directly on a Raspberry Pi and test whether the Pi can process the HALL information properly. The difference of the pi to the ESP/ Arduino is, that there is a python interpreter and a lot of other process are running at the same time on the Pi. Has anybody experience with the processing of the Hall Impulses with the Pi. I know that I have to reduce the 5V Output Signal of the Controller to 3.3V level that the Pi needs. But I think about the interrupt calculation and processing.
Any advice is welcome.
I never test the interrupt on python and raspberry , but you can find info on the net and check on a simple 1 or 10 revolution motor to see at different speed if the odo reading is OK and the max frequency where count fail.
Do not forget to use 2 resistors for level shifting the 5V to 3.3V in the odo pulse count.
Do not forget to use 2 resistors for level shifting the 5V to 3.3V in the odo pulse count.
ullisun58
Well-known member
Hello all,
I connected all my brushless Motors as documented on the Controller Board. and the runs perfect.
Only one question raised up.
The cutter Motor has 2 additional wires and I don't know what function they have. The Motor runs perfect. I saw these additional 2 wires on 3 different cutter Motors, but i found no documentation about them. So only for my interest I ask.
Any body know the answer?
I connected all my brushless Motors as documented on the Controller Board. and the runs perfect.
Only one question raised up.
The cutter Motor has 2 additional wires and I don't know what function they have. The Motor runs perfect. I saw these additional 2 wires on 3 different cutter Motors, but i found no documentation about them. So only for my interest I ask.
Any body know the answer?