Hallo Bernard
Vielen Dank für Ihre rasche Antwort. Mir geht es beim Übersetzen der Sprache ebenso, ich verwende auch den Google Übersetzer.
Zuerst, meine Beteiligung hier in diesem Forum soll auf keinen Fall als Kritik oder Bevormundung irgendwelcher Aktionen verstanden sein.
Sondern ich interessiere mich als Bastler oder "Maschinenbauer" für diese Dinge. Ich baue gerne komplizierte Dinge, war in meinem Beruf Radiotechniker, Computertechniker , Modellbauer und Modellentwickler von Eisenbahn Modellen in H0!
Bislang habe ich von REP_AL (
https://repalmakershop.com/ oder Thingiverse Nr:3040048) und auch von Ardunover die beiden möglichen PCB´s besorgt.
Beide haben Ihren Reiz und sind sehr interessant. REP_AL ist sehr deutlich und ausführlich beschrieben, bei Ardumover ist alles sehr umständlich und nicht sortiert, sehr schwer zu verfolgen!- Das ist nur meine ganz persönliche Meinung!!!
Zwei Chassis habe ich vergangenes Jahr gebaut, es ist noch etwas Arbeit dran.
Und wenn ich hier wieder die PCB´s sehe interessiert es mich auch wieder und ich möchte gewisse Vergleiche aufstellen, damit ich mir einen gut funktionierenden Mäher bauen kann. Deshalb die Frage nach den Vorteilen, dieser Platinen!
Vergangen Woche habe ich die neue PCB von REP_AL bekommen. Ich hab aber auch die Version 1,3 von Ardumover hier liegen und zusammen gebaut. Welche ist nun die Bessere?
Ich werde versuchen , Vergleiche anzustellen.
Beste Grüße Georgio
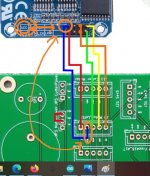
 Main PCB (5V / 3.3V Pcb including ESP32,Teensy4.1 and GY-521) ,it's brain of the robot
Main PCB (5V / 3.3V Pcb including ESP32,Teensy4.1 and GY-521) ,it's brain of the robot









")
")