You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
PiMowBot ein Mähroboter im Eigenbau
- Thread starter ullisun58
- Start date
ullisun58
Well-known member
My experiense outside and also during sunshine is, that the VL53L0X works well between 3cm and 120 cm. But I don't know what happens whenFor lidar, i don't know if they can work outdoor in full sun.Maybe according some model ?
I have tested some VL53L0X 5 years ago ,Indoor result was very good , but outdoor in full sun was totally wrong.
rainy weather or automn weather is. I use no protector in front of the lense. And my DIY LiDAR is fits not for outside, but is much cheaper as a professional LiDAR
Certainly i need to test againMy experiense outside and also during sunshine is, that the VL53L0X works well between 3cm and 120 cm

ullisun58
Well-known member
Hallo an alle,
heute bin ich noch einmal kurz mit den neuen ZS-X11H Controllern gefahren. Das macht wirklich Spaß, zumal ich auch gerade eine BT Fernbedienung auf Basis RaspberryPico teste. Da ist die Handsteuerung noch einmal einen Tuck direkter als über Websocket. Aber was ich eigentlich hier zeigen will ist diese angehängte Aufnhame. Da bin ich auch im Handbetrieb gefahren. Der PiMowBot verfügt ja unteranderem auch über eine visuelle Hinderniserkennung. Um diese auf die Rasenfläche besser kalibrieren zu können, habe ich die entsprechenden Frames die erkannt werden über HTML / CSS eingeblendet. Immer dann wenn der Grünanteil in dem Bildsegment kleiner ist als der eingestellte Threshold dann ersheint das dazugehörige Frame. Die Ausblendung des Frames muss ich noch besser realisieren, z.B. bei Rückwärtsfarten ausblenden. Aber hier kann man sehr schön sehen wie man auch noch die Erkennung der Gelben und orangen Frames zur Reduzierung der RPMs nutzen kann. Bei roten Frames stoppt er im Automatikbetrieb. Die Reduzierznng der Geschwindigkeit muss ich noch in meinen angepassten Motortreiber integrieren. Auch - das kann man hier jetzt nicht sehen - konnte ich sehr gut beobachten, wie bei engen Kurven das nicht angetriebene Rad mitgezogen wurde und sich dann auch drehte. Dazu muss ich die Break Funktion der brushless Controller noch nutzen. Gibt also noch viel zu tun, aber Dank dieser Kommunity bin ich da echt ein ganzes Stückchen weiter gekommen in den letzten Tagen
Gruß
Ulli
heute bin ich noch einmal kurz mit den neuen ZS-X11H Controllern gefahren. Das macht wirklich Spaß, zumal ich auch gerade eine BT Fernbedienung auf Basis RaspberryPico teste. Da ist die Handsteuerung noch einmal einen Tuck direkter als über Websocket. Aber was ich eigentlich hier zeigen will ist diese angehängte Aufnhame. Da bin ich auch im Handbetrieb gefahren. Der PiMowBot verfügt ja unteranderem auch über eine visuelle Hinderniserkennung. Um diese auf die Rasenfläche besser kalibrieren zu können, habe ich die entsprechenden Frames die erkannt werden über HTML / CSS eingeblendet. Immer dann wenn der Grünanteil in dem Bildsegment kleiner ist als der eingestellte Threshold dann ersheint das dazugehörige Frame. Die Ausblendung des Frames muss ich noch besser realisieren, z.B. bei Rückwärtsfarten ausblenden. Aber hier kann man sehr schön sehen wie man auch noch die Erkennung der Gelben und orangen Frames zur Reduzierung der RPMs nutzen kann. Bei roten Frames stoppt er im Automatikbetrieb. Die Reduzierznng der Geschwindigkeit muss ich noch in meinen angepassten Motortreiber integrieren. Auch - das kann man hier jetzt nicht sehen - konnte ich sehr gut beobachten, wie bei engen Kurven das nicht angetriebene Rad mitgezogen wurde und sich dann auch drehte. Dazu muss ich die Break Funktion der brushless Controller noch nutzen. Gibt also noch viel zu tun, aber Dank dieser Kommunity bin ich da echt ein ganzes Stückchen weiter gekommen in den letzten Tagen
Gruß
Ulli
Attachments
ullisun58
Well-known member
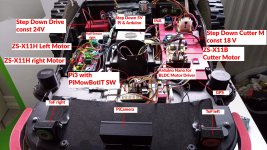
Heute stelle ich eine Übersicht der Komponenten meines ALKO Umbaus online.
Gestern habe ich eine Bluetooth Fernbedienung auf Basis Raspberry Pico-W getestet. Der Code ist noch nicht final, und auch wird es - sobald verfügbar - auch eine Version mit einem analogen Joystick geben. Dann kann man die Geschwindigkeit besser regeln und auch Kurven besser fahren. Ein Video mit der kleinen Fernbedienung habe ich heute nach Youtube hochgeladen. Sobald die mit dem richtigen Joystick fertig ist, dokumentiere ich dann auch eine Probefahrt. Hier ersteinmal das "kleine" youtube Video
Gestern habe ich eine Bluetooth Fernbedienung auf Basis Raspberry Pico-W getestet. Der Code ist noch nicht final, und auch wird es - sobald verfügbar - auch eine Version mit einem analogen Joystick geben. Dann kann man die Geschwindigkeit besser regeln und auch Kurven besser fahren. Ein Video mit der kleinen Fernbedienung habe ich heute nach Youtube hochgeladen. Sobald die mit dem richtigen Joystick fertig ist, dokumentiere ich dann auch eine Probefahrt. Hier ersteinmal das "kleine" youtube Video
Attachments
ullisun58
Well-known member
Der Akku hat eine Spannung von 25,2 bis 29,4 Volt, damit die Motoren bei unterschiedlicher Ladespannung mit einigemaßen gleicher Geschwindigkeit laufen, habe ich die eingebaut. Vielleicht wäre auch einer 24 Volt Regler ausreichend, es sind 24 Volt Motore. Aber ich dachte mir ich entkopple beide Stromkreise, so gut es geht voneinander. Stichwort Hohes / feuchtes Gras.Wofür sind die 24 und 18v StepDown?
Ich möchte aber im nächsten Schritt die SW so verändern, dass die Drehzahl die Referenz ist. Also nicht mit einem PWM SIgnal von 50% bei halber Geschwindigkeit fahren, sondern halbe Geschwindigkeit wären z.B. 14rpm's und um die zu erreichen muss das PWM Signal entsprechend berechnet werden. Die Voraussetzungen dafür sind mit den neuen Kontrollern viel besser als vorher, ich muss nur von meinen Programmierkenntnissen auch in der Lage sein das entsprechend umzusetzen.