You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
LC29H(XX) GPS/RTK HAT
- Thread starter Sascha
- Start date
ullisun58
Well-known member
I tried it outside with a saw blade as plate a while ago. It didn't have any significant measurable effect on my antenna, which came with the standard package. I think I have to measure it over a longer period of time and then calculate an average. That would be the most valid method. What did you do with the long cable? Shorten it or leave it as it is?Try to add a 15cm metal plate under the antenna
Leave as it , but need to put it as far as possible from motor or DC/DC regulatorShorten it or leave it as it is?
ullisun58
Well-known member
Today I tested my new GPS Quectel YB0017AA antenna with my LC29H-DA Breakout-Board
First observation: The signal strength of the satellites is much higher than with the cheap antenna.
Second observation: The RTK-FIX achieved much faster (after about 100 seconds).
Third observation: During my walk around the garden, there were no RTK fix dropouts.
Resume: Receiver 33€, antenna 24€ from AliExpress together with my SAPOS Account gives my a
RTK functionality . I think it is the cheapest solution. Thx @Bernard for the hint with the antenna.
I did the walk through the garden with my windows laptop running teh QGNNS SW- Next step is to mount the antenna on top of my RoπLawnMow
and test my python SW on the pi. I'll keep you informed

First observation: The signal strength of the satellites is much higher than with the cheap antenna.
Second observation: The RTK-FIX achieved much faster (after about 100 seconds).
Third observation: During my walk around the garden, there were no RTK fix dropouts.
Resume: Receiver 33€, antenna 24€ from AliExpress together with my SAPOS Account gives my a
RTK functionality . I think it is the cheapest solution. Thx @Bernard for the hint with the antenna.
I did the walk through the garden with my windows laptop running teh QGNNS SW- Next step is to mount the antenna on top of my RoπLawnMow
and test my python SW on the pi. I'll keep you informed
Attachments

ullisun58
Well-known member
Hi Bernard, sorry that I am disturbing you again.Leave as it , but need to put it as far as possible from motor or DC/DC regulator
I played around a bit with the LC29H-BS board today. My impression is that the command set is smaller than that of the DA module.
For example, I couldn't even manage to set a different baud rate. But the command $PQTMCFGSVIN,W,2,0,0.0,-2472446.4619,4828304.1363,3343730.2653*34 was acknowledged with $PQTMCFGSVIN,OK*70. So that shows me that the base-station know where it is. The other commands, as described in this blog, don't send an acknowledgment to the terminal window, only the Firmware query is working propperly. Which C++ code are you using in Base Station?
Have you had similar experiences? How long did it take for your rover to recognize an RTK_Fixed signal?
Thanks in Advanced for your Answer.
Best Regards Ulli
ullisun58
Well-known member
Hi @Bernard, today I had success with the configuration of the RTK-Base-Station in combination with a Raspberry Pi and python as language.Leave as it , but need to put it as far as possible from motor or DC/DC regulator
The challenge is to configure / find the absolute Position of the Base Station.
I did it in this way: antenna is installed and has clear view to the sky. First I connect the antenna to the rover modul. The rover speaks with my SAPOS Service, wait until the RTK-Fixed is available and i saved Lat and Lon and alt.
Now I used the same antenna and connected it to the LC29H-BS Modul, loaded the saved Lat lon and alt into the code and run the base-station.
Now I start my Rover-script with the Quectel YB0017AA antenna. After some seconds I got a RTK-Float and after one or two Minutes I got an RTK-Fixed. The position of the detected Lat lon has an offset of around 3 meters. So I think I have to play a little with parameters in the
$PQTMCFGSVIN,W,2,0,0.0,3879099.1095,591052.6521,5011529.9782*2C command.
But great is, that I have the RTK-Rover and the RTK-Base up and running. Now the rest seems that finetuning is needed.
For anyone interested in the Python code of the base station.I have a few more ideas to optimize it.
Python:
#!/usr/bin/env python3
import serial, socket, threading, time, math, sys, os
from datetime import datetime
# === Konfiguration ===
SERIAL_PORT = "/dev/ttyUSB0"
BAUDRATE = 115200
TCP_PORT = 2102 # Port, über den Rover sich verbinden
# Feste Position deiner Basisstation
BASE_LAT = 48.13743
BASE_LON = 11.57549
BASE_ALT = 64.12
# === Globale Variablen ===
clients = []
stop_flag = False
# === Hilfsfunktionen ===
def log(msg):
now = datetime.now().strftime("%H:%M:%S.%f")[:-3]
print(f"[{now}] {msg}")
def calc_x_y_z(lat, lon, alt):
"""WGS84 → ECEF (XYZ)"""
a = 6378137.0
e2 = 6.69437999014e-3
lat_r = math.radians(lat)
lon_r = math.radians(lon)
N = a / math.sqrt(1 - e2 * math.sin(lat_r)**2)
x = (N + alt) * math.cos(lat_r) * math.cos(lon_r)
y = (N + alt) * math.cos(lat_r) * math.sin(lon_r)
z = (N * (1 - e2) + alt) * math.sin(lat_r)
return x, y, z
def nmea_checksum(sentence):
"""Berechnet NMEA-Checksumme"""
csum = 0
for c in sentence:
csum ^= ord(c)
return f"*{csum:02X}"
def send_cmd(ser, cmd):
"""Sendet ASCII-Befehl mit automatischer Prüfsumme"""
if "*" not in cmd:
base = cmd.split("$")[1]
cmd = f"${base}{nmea_checksum(base)}"
ser.write((cmd + "\r\n").encode())
log(f"[TX] {cmd}")
time.sleep(0.2)
# === Initialisierung LC29H ===
def init_lc29_base(ser):
"""Setzt LC29H-DA in Basis-Mode"""
log("=== LC29HDA Basis Init Start ===")
# Berechne ECEF-Koordinaten
x, y, z = calc_x_y_z(BASE_LAT, BASE_LON, BASE_ALT)
log(f"[BASE POS] LAT={BASE_LAT:.7f}, LON={BASE_LON:.7f}, ALT={BASE_ALT:.2f}")
log(f"[BASE POS] X={x:.4f}, Y={y:.4f}, Z={z:.4f}")
# Standort (ECEF) schreiben
send_cmd(ser, f"$PQTMCFGSVIN,W,2,0,0.0,{x:.4f},{y:.4f},{z:.4f}")
# Antenne aktivieren, Ausgabe einschalten
send_cmd(ser, "$PQTMCFGRTCM,W,1,1,1,1,1,1,1,1,1,1") # alle RTCM aktivieren
#send_cmd(ser, "$PQTMCFGMSG,0,1,0,0,0,0,0") # nur RTCM-Ausgabe
send_cmd(ser, "$PQTMVERNO")
log("[DONE] LC29HDA ready and transmitting RTCM ✓")
# === RTCM Listener ===
def rx_thread(ser):
"""Liest RTCM von LC29H und verteilt sie an Clients"""
global stop_flag
buffer = b""
while not stop_flag:
try:
chunk = ser.read(1024)
if not chunk:
continue
buffer += chunk
# RTCM frames starten immer mit 0xD3
while len(buffer) > 2:
if buffer[0] != 0xD3:
buffer = buffer[1:]
continue
if len(buffer) < 3:
break
length = ((buffer[1] & 0x03) << 8) | buffer[2]
if len(buffer) < 3 + length + 3:
break
frame = buffer[:3 + length + 3]
buffer = buffer[3 + length + 3:]
if len(frame) < 6:
continue
msg_type = ((frame[3] & 0xFC) << 4) | (frame[4] >> 4)
log(f"[RTCM3] Type {msg_type:<4} | Size {len(frame)} bytes")
# An alle verbundenen Rover senden
for c in clients.copy():
try:
c.sendall(frame)
except Exception:
clients.remove(c)
except Exception as e:
log(f"[RX ERROR] {e}")
time.sleep(1)
# === TCP-Server für Rover ===
def tcp_server():
"""TCP Server, der RTCM an Rover streamt"""
global clients
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
s.bind(("0.0.0.0", TCP_PORT))
s.listen(1)
log(f"[SERVER] RTCM TCP Server läuft auf Port {TCP_PORT}")
while True:
conn, addr = s.accept()
log(f"[SERVER] Neuer Rover verbunden: {addr}")
clients.append(conn)
# === Main ===
def main():
ser = serial.Serial(SERIAL_PORT, BAUDRATE, timeout=1)
init_lc29_base(ser)
threading.Thread(target=tcp_server, daemon=True).start()
rx_thread(ser)
if __name__ == "__main__":
try:
main()
except KeyboardInterrupt:
log("Beendet durch Benutzer.")
stop_flag = True
sys.exit(0)I don't understand.The challenge is to configure / find the absolute Position of the Base Station.
To find the absolute position of your base station, simply connect your base station to Qgnss and read the value.
Leave the LC29HBS powered ON for at least 24Hours to have a perfect location.
ullisun58
Well-known member
so the values in the lat lon and alt field after 24Hours operation?I don't understand.
To find the absolute position of your base station, simply connect your base station to Qgnss and read the value.
Leave the LC29HBS powered ON for at least 24Hours to have a perfect location.
okay that would be easy. is this documented in a Quectel Guide?
ullisun58
Well-known member
Now I found the quectel_lc29hbs_gnss_protocol_specification_v1.pdf and started the survey-in-process. Hope I have a result after the process is finished.I don't understand.
To find the absolute position of your base station, simply connect your base station to Qgnss and read the value.
Leave the LC29HBS powered ON for at least 24Hours to have a perfect location.

Here the 2 protocol for base and rover module:Now I found the quectel_lc29hbs_gnss_protocol_specification_v1.pdf and started the survey-in-process. Hope I have a result after the process is finished.
Attachments
FYI: I made this PCB for openmower project.
")
GitHub - MS71/RTK1010Board: Arduino Compatible RTK1010 Board/PCB
Arduino Compatible RTK1010 Board/PCB. Contribute to MS71/RTK1010Board development by creating an account on GitHub.
 github.com
github.com
ullisun58
Well-known member
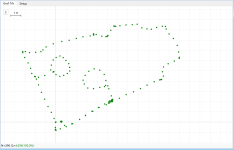
Hallo, ich habe nun meine GPS-RTK Lösung fertig.  Zumindestens liefert sie stabile und verlässliche Geo-Punkte. Die Auswertung in meiner drive.py oder mower.py muss ich noch realisieren. Aber das System zeichnet schon mal Geo-Punkte während der Fahrt auf.
Zumindestens liefert sie stabile und verlässliche Geo-Punkte. Die Auswertung in meiner drive.py oder mower.py muss ich noch realisieren. Aber das System zeichnet schon mal Geo-Punkte während der Fahrt auf.
Und ja, das LC29H(DA) gibt leider nur jede Sekunde Daten raus, das führt dazu, dass ich im Betrieb mit der Fernbedienung z.B. den Mower schon gestoppt habe, der Mower steht und der nächste GeoPunkt kommt dann erst noch eine Sekunde später. In der Regel ein Offset von 30-40 cm je nach letzter Geschwindigkeit. Ich denke dass kann ich aber gut mit der SW abfangen.
Habe wieder 'ne Menge bei diesem Projekt gelernt, Danke an @Bernard und ChatGPT") Fakt ist, ich hätte vor 2 Jahren nicht gedacht, dass ich eine RTK Lösung baue. Das erschien mir viel zu teuer. Aber mit den Quectel Modulen ist das echt erschwinglich geworden.
Fakt ist, ich hätte vor 2 Jahren nicht gedacht, dass ich eine RTK Lösung baue. Das erschien mir viel zu teuer. Aber mit den Quectel Modulen ist das echt erschwinglich geworden.
Den Code findet ihr hier auf Github. Your Feedback is welcome.
Ahh noch eins, die Webseite werde ich noch überarbeiten. Da wird dann auch ein Livetracking während der Fahrt möglich sein. Als nächstes steht jetzt die Implementation der GPS-Ist und Ziel Werte in die Fahrbefehle an.
Zumindestens liefert sie stabile und verlässliche Geo-Punkte. Die Auswertung in meiner drive.py oder mower.py muss ich noch realisieren. Aber das System zeichnet schon mal Geo-Punkte während der Fahrt auf.Und ja, das LC29H(DA) gibt leider nur jede Sekunde Daten raus, das führt dazu, dass ich im Betrieb mit der Fernbedienung z.B. den Mower schon gestoppt habe, der Mower steht und der nächste GeoPunkt kommt dann erst noch eine Sekunde später. In der Regel ein Offset von 30-40 cm je nach letzter Geschwindigkeit. Ich denke dass kann ich aber gut mit der SW abfangen.
Habe wieder 'ne Menge bei diesem Projekt gelernt, Danke an @Bernard und ChatGPT
Fakt ist, ich hätte vor 2 Jahren nicht gedacht, dass ich eine RTK Lösung baue. Das erschien mir viel zu teuer. Aber mit den Quectel Modulen ist das echt erschwinglich geworden.Den Code findet ihr hier auf Github. Your Feedback is welcome.
Ahh noch eins, die Webseite werde ich noch überarbeiten. Da wird dann auch ein Livetracking während der Fahrt möglich sein. Als nächstes steht jetzt die Implementation der GPS-Ist und Ziel Werte in die Fahrbefehle an.
ullisun58
Well-known member
Und nun ist auch das Gehäuse für die Basisstation fertig. 80x80 Aufputz Installationsdose.
In den Deckel habe ich 3 Leuchtdioden WS2812 eingebaut. Da die Station wird im Gartenhaus installiert und mit einem Shelly Ein- / ausgeschaltet.
Die Leuchtdioden sollen "On / OFF WLAN connect" "Betriebs Modus" und (hoffentlich nicht) "Störung" anzeigen. Wer gute augen hat wird erkennen dass es sich um einen der ersten PiZero W handelt. Baujahr 2017. Das lässt ihn total kalt.
Spannendes Projekt. Wer kennt denn ein "cheap" RF Modul um die Korrekturdaten auch bei großen Grundstücken auf den Rechner zu bringen. Ich denke da im Moment nicht an DatenFunk mit SIM Karte hier fallen i.d.R. Gebühren an. Mit den Nrf24L01 habe ich schon mal gearbeitet, das war aber sehr unzuverlässig.
Schönen Rest-Sonntag noch

In den Deckel habe ich 3 Leuchtdioden WS2812 eingebaut. Da die Station wird im Gartenhaus installiert und mit einem Shelly Ein- / ausgeschaltet.
Die Leuchtdioden sollen "On / OFF WLAN connect" "Betriebs Modus" und (hoffentlich nicht) "Störung" anzeigen. Wer gute augen hat wird erkennen dass es sich um einen der ersten PiZero W handelt. Baujahr 2017. Das lässt ihn total kalt.
Spannendes Projekt. Wer kennt denn ein "cheap" RF Modul um die Korrekturdaten auch bei großen Grundstücken auf den Rechner zu bringen. Ich denke da im Moment nicht an DatenFunk mit SIM Karte hier fallen i.d.R. Gebühren an. Mit den Nrf24L01 habe ich schon mal gearbeitet, das war aber sehr unzuverlässig.
Schönen Rest-Sonntag noch
ullisun58
Well-known member
Und dies ist mein RTK-Rover Receiver.
Eine Decken-Lampenanschlußdose aus Metall dient als Gehäuse, gibt es für 7€ im Baumarkt. Bietet also für die Antenne eine gute Abschirmung nach unten und zugleich genügend Platz um das LC29H(DA) und den Serial => USB Wandler unterzubringen.

Eine Decken-Lampenanschlußdose aus Metall dient als Gehäuse, gibt es für 7€ im Baumarkt. Bietet also für die Antenne eine gute Abschirmung nach unten und zugleich genügend Platz um das LC29H(DA) und den Serial => USB Wandler unterzubringen.
Thank you for informative project.Hello everyone,
A short report on the LV29HEA RTK GPS, which promises 10Hz, but I couldn't achieve RTK-Fix at that rate. However, at 5Hz, I was able to achieve it, and it seems stable.
Here’s a configuration that worked successfully in my tests. I’m sharing it here to help others as well.
View attachment 1804
Not all settings are necessary, but for testing, I had to enable a few things to make sure the communication worked as expected.
Since I couldn't find an easy solution online for testing, I wrote a program for an ESP32 that communicates with my phone via Bluetooth. This was necessary because the LC29HEA only works at 460800 baud rate...
The ESP32 can also communicate via UART, but I still need to refine that version.
- GPS → ESP32 @ 460800 baud rate
- ESP32 → Phone @ 115200 baud rate
View attachment 1805View attachment 1806
On iPhone, I used the SW MAPS application.
On Android, I used the GNSS Master application.
So far, my experience shows that this GPS is suitable for use in a rover at 5Hz.
For NTRIP, I used Centipede, as it provided the most stable connection.
View attachment 1809View attachment 1810
The repeatability accuracy I observed is between 2-3 cm.
Please, can this also work perfectly on the DA board version?
Fürst Ruprecht
Well-known member
Ich nutze die SIK-V3 Radios (für die PC-Verbindung) von Ali in verschiedenen Ausführungen. Ich denke, da ist der Nrf24L01 drin, aber das ist nur eine Vermutung. Meine Erfahrungen sind auch eher gemischt. Bei mir ist das Problem, daß mit dem unebenen Gelände die Sichtverbindung unterbrochen wird und außerdem die Ausrichtung der Roverantenne ständigen Änderungen unterliegt - das führt dann zwangsläufig zu Verschlechterungen in der Verbindung. Bei all der Elektronik im Mäher gibt es natürlich auch Störeinflüsse.
Die habe ich vor kurzem gesehen: SiK Telemetry Radio V3
Für die Übertragung des Basis-Referenzsignal nutze ich einen esp32 (jeweils einer in der Basisstation und im Rover). Die Software dafür gibt es bei Ardusimple. Ardusimple nutzt standardmäßig einen XBee, bietet aber auch einen esp32 für seine ardu-simple-module an. Wie gesagt, das Modul kann man leicht selbst herstellen. Bei mir speist die Basisstation das Signal ins heimische wlan. dadurch kann ich dann mehrere Senken mit dem Signal versorgen. Denkbar ist aber auch ein fliegender access-point oder die direkte Verbindung.
Die habe ich vor kurzem gesehen: SiK Telemetry Radio V3
Für die Übertragung des Basis-Referenzsignal nutze ich einen esp32 (jeweils einer in der Basisstation und im Rover). Die Software dafür gibt es bei Ardusimple. Ardusimple nutzt standardmäßig einen XBee, bietet aber auch einen esp32 für seine ardu-simple-module an. Wie gesagt, das Modul kann man leicht selbst herstellen. Bei mir speist die Basisstation das Signal ins heimische wlan. dadurch kann ich dann mehrere Senken mit dem Signal versorgen. Denkbar ist aber auch ein fliegender access-point oder die direkte Verbindung.
ullisun58
Well-known member
I MKL001,Thank you for informative project.
Please, can this also work perfectly on the DA board version?
if you refer to the post from adamat with all these commands, I can say that not all commands fit to the DA board.
To set up a DA Board in a propper way, I used only this commands.
§PQTMVERNO*58
$PQTMCFGRCVRMODE,R*32
$PQTMCFGRCVRMODE,W,2*29
$PQTMCFGRCVRMODE,R*32
$PAIR434,1*24
$PAIR062,0,01*0F
After taht you will get every 1 Second a GPS-Data-Set.
Best Regards & good Luck
Thank you for this informative response.I MKL001,
if you refer to the post from adamat with all these commands, I can say that not all commands fit to the DA board.
To set up a DA Board in a propper way, I used only this commands.
§PQTMVERNO*58
$PQTMCFGRCVRMODE,R*32
$PQTMCFGRCVRMODE,W,2*29
$PQTMCFGRCVRMODE,R*32
$PAIR434,1*24
$PAIR062,0,01*0F
After taht you will get every 1 Second a GPS-Data-Set.
Best Regards & good Luck
But please, can you help me a video tutorial or screenshot on how to setup the module and enter the commands using the QGNSS. And also I want to connect it with Esp32 module too.
Thank you in anticipation for your response.
ullisun58
Well-known member
Hi MKL001Thank you for this informative response.
But please, can you help me a video tutorial or screenshot on how to setup the module and enter the commands using the QGNSS. And also I want to connect it with Esp32 module too.
Thank you in anticipation for your response.
sorry in the Moment a can't provide any screenshots. Both of my LC29H are build in projects and are running well. But the QGNSS Software is very easy to use. But there are some youTubes in the Internet available. Also the documentation in Bernhards post is helpfull. I never connected the LC29h to ESP32. so I have no experience in this - Sorry