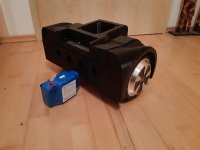
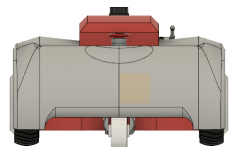
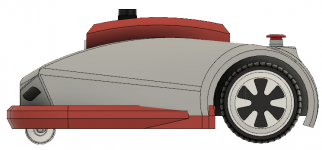
As I'm currently waiting for some components to continue with ROSMower, I started to build a 3D printable chassis from scratch. I call it HowerMower, as it is based on Hoverboard Motors, battery, PCB as motor driver and some other components of Hoverboard.
All motors operates at 42V, just because Hoverboards do so. But less voltage will also work.
In my opinion, chassis and software should be exchangeable and not related to each other. That's the reason why I will distinct between HowerMower as Chassis and ROSMower as Software stack.
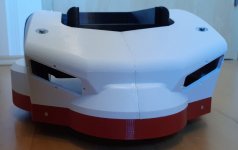
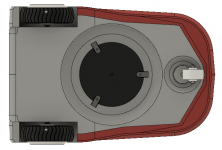
The upper box with antenna contains all expensive electronic parts, like RaspberryPI or Jetson Nano, Lidar, Stereo Camera and so. It will be detachable so it can be carried to a different robot. As the Ardumower PCB will fit inside, it would be also possible to use it with nearly any PCB or Software you want.
For build instructions, 3D files and BOM, please visit https://hovermower.github.io
I'm interested what you think about this.





All motors operates at 42V, just because Hoverboards do so. But less voltage will also work.
In my opinion, chassis and software should be exchangeable and not related to each other. That's the reason why I will distinct between HowerMower as Chassis and ROSMower as Software stack.
The upper box with antenna contains all expensive electronic parts, like RaspberryPI or Jetson Nano, Lidar, Stereo Camera and so. It will be detachable so it can be carried to a different robot. As the Ardumower PCB will fit inside, it would be also possible to use it with nearly any PCB or Software you want.
For build instructions, 3D files and BOM, please visit https://hovermower.github.io
I'm interested what you think about this.
Attachments


Last edited:









")