Fürst Ruprecht
Well-known member
Stand 11.04.2022:
Vom störungsfreien Betrieb bin ich wohl noch weit entfernt.
Immerhin funktioniert nach 3 grausamen Tagen das Fahren und Lenken per Fernsteuerung.
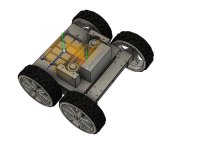
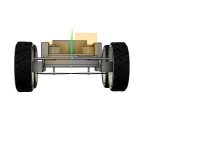
Der Traktor lenkt an der Vorderachse (starre Ramenverbindung): Dabei schwenkt die Hinterachse leicht ein (sehr wichtig bei Autobahnfahrt!). Der Lenkeinschlag wird an Vorder- und Hinterachse gemessen und bei Soll/Ist-Abweichung steuert ein Drehzahloffset an den Rädern entgegen. Die einzelnen Raddrehzahlen werden aus dem Istwinkel der Räder berechnet. (Es geht auch das Sollsignal. Dann wird die Lenkung schneller und es gibt entsprechend Schlupf)
Der Traktor lenkt an der Hinterachse: (hier ist die Achse drehbar am Rahmen befestigt)(Vorn kann auch Hinten sein - Geschmackssache). Also genauso wie oben.
Der Traktor lenkt an beiden Achsen: Hier habe ich das Verhältnis von Vorn zu Hinten 1:1 gesetzt. Man kann auch dynamisch von 1:0 bis 0:1 stufenlos verändern, ist aber recht schwer in der Bedienung.
Gruß Fürst Ruprecht
View attachment IMG_6981.MOV
View attachment IMG_6980.MOV
View attachment IMG_6978.MOV
View attachment IMG_6979.MOV
Vom störungsfreien Betrieb bin ich wohl noch weit entfernt.
Immerhin funktioniert nach 3 grausamen Tagen das Fahren und Lenken per Fernsteuerung.
Der Traktor lenkt an der Vorderachse (starre Ramenverbindung): Dabei schwenkt die Hinterachse leicht ein (sehr wichtig bei Autobahnfahrt!). Der Lenkeinschlag wird an Vorder- und Hinterachse gemessen und bei Soll/Ist-Abweichung steuert ein Drehzahloffset an den Rädern entgegen. Die einzelnen Raddrehzahlen werden aus dem Istwinkel der Räder berechnet. (Es geht auch das Sollsignal. Dann wird die Lenkung schneller und es gibt entsprechend Schlupf)
Der Traktor lenkt an der Hinterachse: (hier ist die Achse drehbar am Rahmen befestigt)(Vorn kann auch Hinten sein - Geschmackssache). Also genauso wie oben.
Der Traktor lenkt an beiden Achsen: Hier habe ich das Verhältnis von Vorn zu Hinten 1:1 gesetzt. Man kann auch dynamisch von 1:0 bis 0:1 stufenlos verändern, ist aber recht schwer in der Bedienung.
Gruß Fürst Ruprecht
View attachment IMG_6981.MOV
View attachment IMG_6980.MOV
View attachment IMG_6978.MOV
View attachment IMG_6979.MOV