Fürst Ruprecht
Well-known member
Eve mäht nun reproduzierbar und genau.
Behobene Fehler: RTK-Auflösung der Basisstation erhöht ( entgegen vielen Aussagen im Internet, muß die Genauigkeit des Basisstation höher sein als die erforderliche Genauigkeit im Rover -> hier: 1cm ).
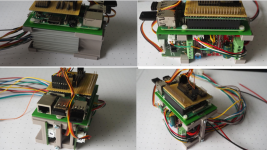
Kalibrierung des Kompass im Pixhawk-PCB.
Optimierung verschiedener Parameter im Pixhawk-PCB (Antrieb, Waypoint-Parameter).
Korrekter Umgang mit der Home-Position !!
Aktueller Stand:
Mit der RC-Fernsteuerung werden waypoints angefahren und abgespeichert. Diese Waypoints werden in den Mission-Planner (PC) hochgeladen / gespeichert (txt-file). Die Waypoints werden in ein Polygon gewandelt und dieses in ein Surface-Grid. (Nachteil: Mindestabstand zwischen den Bahnen ist standardmäßig 30cm). Danach werden die erzeugten Grid-Waypoints in den Pixhawk runtergeladen und der Mäher startet im Auto-Modus. -> sehr flexibel und komfortabel. (Nachteil: man braucht einen PC. Vorteil: Einzelmissionen / Teilmissionen können per Texteditor zusammengefügt werden, man kann beliebig viele Missionen erzeugen und abspeichern -> keine Musterbildung im Rasen. Man kann so auch sehr schnell den Rasen vom Nachbarn mähen oder den Mäher durchs Dorf fahren lassen .. und man hat eine Kommandozentrale zur Kontrolle des Mähers ).
Ausblick.
- keine Ahnung, was mach ich jetzt daraus ?
Gruß Fürst Ruprecht
Behobene Fehler: RTK-Auflösung der Basisstation erhöht ( entgegen vielen Aussagen im Internet, muß die Genauigkeit des Basisstation höher sein als die erforderliche Genauigkeit im Rover -> hier: 1cm ).
Kalibrierung des Kompass im Pixhawk-PCB.
Optimierung verschiedener Parameter im Pixhawk-PCB (Antrieb, Waypoint-Parameter).
Korrekter Umgang mit der Home-Position !!
Aktueller Stand:
Mit der RC-Fernsteuerung werden waypoints angefahren und abgespeichert. Diese Waypoints werden in den Mission-Planner (PC) hochgeladen / gespeichert (txt-file). Die Waypoints werden in ein Polygon gewandelt und dieses in ein Surface-Grid. (Nachteil: Mindestabstand zwischen den Bahnen ist standardmäßig 30cm). Danach werden die erzeugten Grid-Waypoints in den Pixhawk runtergeladen und der Mäher startet im Auto-Modus. -> sehr flexibel und komfortabel. (Nachteil: man braucht einen PC. Vorteil: Einzelmissionen / Teilmissionen können per Texteditor zusammengefügt werden, man kann beliebig viele Missionen erzeugen und abspeichern -> keine Musterbildung im Rasen. Man kann so auch sehr schnell den Rasen vom Nachbarn mähen oder den Mäher durchs Dorf fahren lassen .. und man hat eine Kommandozentrale zur Kontrolle des Mähers ).
Ausblick.
- keine Ahnung, was mach ich jetzt daraus ?
Gruß Fürst Ruprecht