Fürst Ruprecht
Well-known member
Broken!
Fell off the workbench.
Fell off the workbench.





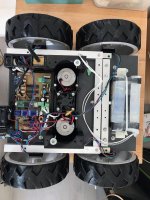




It's difficult to show it working because it's 2 chassis , but the main is.Bernard could you please show your magnet solution.
How do you make a suitable housing attachment for this?

To power the teensy from USB you need to have the shunt present and not when using a external supply.Its working again. Teensy had a short circuit. Got hot with no circuit, powered from usb port.
Arrived today: 2x BMS







