Fürst Ruprecht
Well-known member
Hallo bei meinem Allradmäher „deTHoMAso“ !
Das ist die Geschichte von meinem zweiten Mäher und wie er sich so entwickelt hat.
( Es gibt inzwischen zwei weitere Allrad-Mäher - „EVE“ und „Arnold“. Dazu findet Ihr jeweils einen eigenständigen Beitrag)
Letzter Stand (19.04.2022):

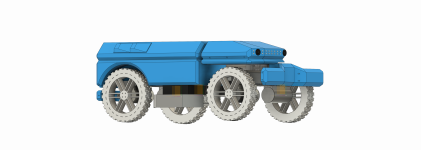
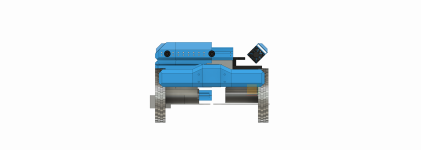
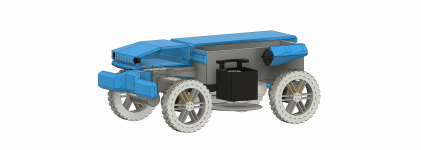
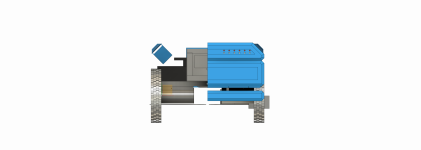
Aufgrund der Beschaffenheit meines Grundstücks (leicht abfallend, mit ca. 6m Böschungsstreifen) habe ich einen Allradmäher gebaut. Es handelt sich hier bereits um die zweite Baustufe, die in diesem Frühjahr entstanden ist.
Grundlage bildet das Konzept vom Ardumower.
Folgende wesentliche Komponenten sind verbaut:
Marotronic PCB 1.3, 4xGetriebemotor brushed, 2xMähmotor brushed marotronics, nema17-Steppermotor mit Getriebe 1:19 als Lenkung - esp32 mit Standard-Steppertreiber als Ansteuerung für den Steppermotor, IMU, RC-Fernsteuerung, 2xGehäuselüfter 50mm für Kühlung (insb. Steppertreiber), esp32 für Parametrierung und Steuerung (Webserver-Lösung).
Das Gehäuse besteht aus Alu-Profilen (Baumarkt) beplankt mit Weißblech von der Waschmaschine.
Die restlichen Teile sind Normteile und Kunststoffteile aus dem 3D-Drucker (insbesondere die Vorderachse).
Gruß Fürst Ruprecht
Das ist die Geschichte von meinem zweiten Mäher und wie er sich so entwickelt hat.
( Es gibt inzwischen zwei weitere Allrad-Mäher - „EVE“ und „Arnold“. Dazu findet Ihr jeweils einen eigenständigen Beitrag)
Letzter Stand (19.04.2022):
Aufgrund der Beschaffenheit meines Grundstücks (leicht abfallend, mit ca. 6m Böschungsstreifen) habe ich einen Allradmäher gebaut. Es handelt sich hier bereits um die zweite Baustufe, die in diesem Frühjahr entstanden ist.
Grundlage bildet das Konzept vom Ardumower.
Folgende wesentliche Komponenten sind verbaut:
Marotronic PCB 1.3, 4xGetriebemotor brushed, 2xMähmotor brushed marotronics, nema17-Steppermotor mit Getriebe 1:19 als Lenkung - esp32 mit Standard-Steppertreiber als Ansteuerung für den Steppermotor, IMU, RC-Fernsteuerung, 2xGehäuselüfter 50mm für Kühlung (insb. Steppertreiber), esp32 für Parametrierung und Steuerung (Webserver-Lösung).
Das Gehäuse besteht aus Alu-Profilen (Baumarkt) beplankt mit Weißblech von der Waschmaschine.
Die restlichen Teile sind Normteile und Kunststoffteile aus dem 3D-Drucker (insbesondere die Vorderachse).
Gruß Fürst Ruprecht
Attachments
-
 0E6397E9-C079-42A9-8C85-7C49E23F5314.jpeg1.8 MB · Views: 12
0E6397E9-C079-42A9-8C85-7C49E23F5314.jpeg1.8 MB · Views: 12 -
 FC67D73B-44C6-439B-9D01-3444DB9139FA.jpeg888.6 KB · Views: 10
FC67D73B-44C6-439B-9D01-3444DB9139FA.jpeg888.6 KB · Views: 10 -
 AC3AF6F4-AC70-4CC9-AA8B-9C5ACB16D773.jpeg860.2 KB · Views: 10
AC3AF6F4-AC70-4CC9-AA8B-9C5ACB16D773.jpeg860.2 KB · Views: 10 -
 96B02173-0A13-477E-A741-EEA25CFBFE75.jpeg783.4 KB · Views: 10
96B02173-0A13-477E-A741-EEA25CFBFE75.jpeg783.4 KB · Views: 10 -
 76E4E18D-1FF3-47D7-985D-12EAE54765B6.jpeg946.8 KB · Views: 10
76E4E18D-1FF3-47D7-985D-12EAE54765B6.jpeg946.8 KB · Views: 10 -
 EB10FA18-D194-4086-9DC1-7CBF6FDBD5A6.jpeg884.3 KB · Views: 9
EB10FA18-D194-4086-9DC1-7CBF6FDBD5A6.jpeg884.3 KB · Views: 9
Last edited:
")